











Brazo robótico manipulador multifunción industrial de 6 ejes
Descripción del producto
Brazo robótico manipulador multifunción industrial de 6 ejes
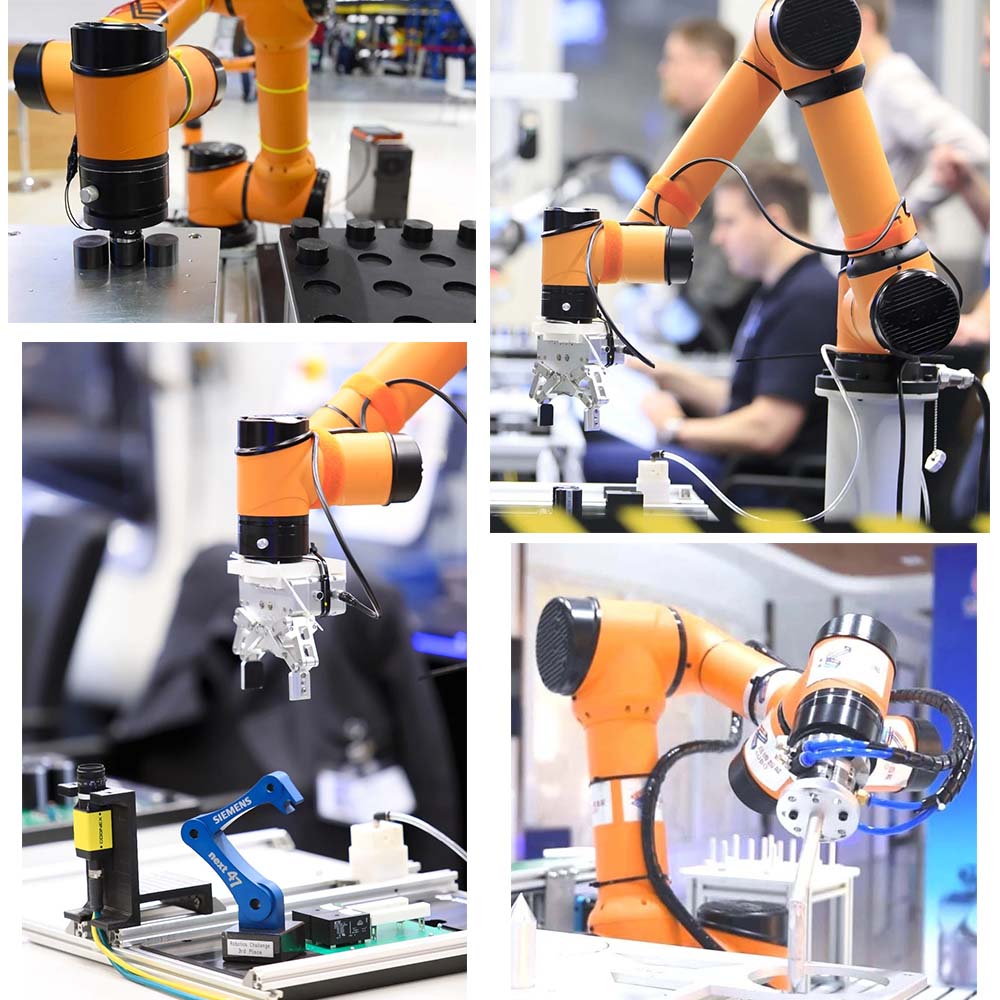
Hoy en día, muchas fábricas modernas tienen brazos robóticos en la línea de producción, y la posición y la postura de las piezas originales a procesar tienen más cambios, que deben completarse con brazos robóticos de múltiples ejes y articulaciones. El robot industrial de seis ejes actual, como el tipo más utilizado en robots industriales, tiene muchas ventajas, como alta flexibilidad, gran carga y alta precisión de posicionamiento. Un brazo mecánico común con articulaciones de seis ejes impulsa la rotación de seis ejes de articulación a través de seis servomotores directamente a través de reductores, ruedas de correa de distribución, etc. Los robots industriales de seis ejes generalmente tienen seis grados de libertad. Los robots industriales de seis ejes comunes incluyen rotación (eje S), brazo inferior (eje L), brazo superior (eje U), rotación de muñeca (eje R) y balanceo de muñeca (eje B) y rotación de muñeca (eje T). Las seis articulaciones se combinan para realizar el movimiento de seis grados de libertad al final.
Composición del manipulador de forja
Mecanismo de accionamiento: incluye garras, muñecas, brazos, columnas y mecanismo de marcha.
1. Garra
Es la parte que sujeta la pieza de trabajo, similar a la abrazadera del manipulador de forja. La forma de la garra de sujeción es similar a la de un dedo humano, con acciones de sujeción y liberación.
2. Muñeca
Es una parte que conecta la garra y el brazo, sostiene la garra y ajusta la posición de la pieza de trabajo sujeta en el espacio. La muñeca generalmente tiene tres movimientos de lanzamiento, balanceo de izquierda a derecha y rotación alrededor de su propio eje. Algunos manipuladores no tienen muñeca.
3. Brazo
Es un componente que se utiliza para sostener la pieza de trabajo sujetada, las garras y la muñeca. Puede mover la pieza de trabajo de una posición a otra en el espacio según una determinada trayectoria. Generalmente, el brazo tiene movimientos como extensión hacia adelante y hacia atrás, elevación hacia arriba y hacia abajo, rotación hacia la izquierda y hacia la derecha y oscilación hacia arriba y hacia abajo.
4. Columna
Es la parte que sostiene el brazo. La columna del manipulador suele ser fija, a veces por necesidad, la columna también se puede diseñar para ser móvil, denominada columna móvil.
5. Mecanismo para caminar
Cuando el manipulador necesita completar una operación de relativamente larga distancia, se puede instalar un mecanismo de desplazamiento, como rodillos y rieles de guía, en la base para realizar el movimiento de toda la máquina.
Inteligencia
1. Los sistemas de visión se pueden integrar en el controlador.
2. Sistema de software basado en la gestión de plataforma en la nube que realiza mantenimiento remoto, diagnóstico de fallas y actualización en línea del firmware.
3. Esta plataforma de robot de investigación se utiliza ampliamente en todo el mundo en laboratorios de investigación corporativos y para investigación académica en robótica.
Diseño modular
1. El robot se puede configurar para tener entre cuatro y siete grados de libertad para cumplir con los requisitos del usuario.
2. La longitud de la junta se puede personalizar para enlaces más largos o más cortos.
Además de la máquina de brazo robótico, nuestra empresa también tiene muchos productos, como extractor de humos de soldadura, dispensador de pasta de soldadura, alimentador de tornillo de mano neumático, alimentador de tornillo automático. Si necesita estos productos, puede contactarnos, le responderemos lo antes posible.
Especificaciones técnicas
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety monitored stop, speed and separation monitoring, hand guid operation, power and force limiting design. |
| Certifications |
ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 ISO 12100:2010, ISO 13849-1:2008, CE |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python. |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | User I/O | Safety I/O | |
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | - | |
| Communication | TCP/IP, Modbus-RTU/TCP | Analog out | 4 | - | |
| Power supply | 100-240 VAC, 50-60Hz | Power input | 24 Volts | ||
| IP Classification | IP54 | Power output | 3A | ||



Grupos de Producto : Robot Arm Machine > Kingsom Nueva Llegada Manipulador de Forja Industrial Brazo Robot